



1900년이 막 지났을 무렵, 사람들은 자동차 매력에 점차 눈을 뜨기 시작했다. 특히 엔진으로 움직이는 기계는 일상을 넘어 다양한 활용여부를 위해 새로운 시도가 이어졌다. 그 가운데 하나가 바로 산악자동차였다. 하지만 두 바퀴 구동의 자동차는 미끄러지거나 한 쪽 바퀴가 회전력을 잃는 순간 애물단지였다. 그래서 1년의 연구 끝에 개발된 시스템이 바로 4WD(Wheel Drive)다<편집자 주>.
1902년 폴란드에서 마차를 만들던 스파이커 형제는 당시 독일과 프랑스를 중심으로 산악 자동차 경주가 유행하자 4WD 자동차를 발명했다. 이듬해 프랑스에서 열린 경주에 출전했고, 2WD 방식을 모두 따돌리고 우승을 차지했다. 1904년에는 4WD 방식의 자동차 5대를 만들어 관광과 여행용으로 판매했다. 당시만 해도 아스팔트 포장 도로가 없었던 시절이어서 험한 길을 달리는 데 적합하다는 소문과 함께 큰 인기를 모았다. 급기야 1906년 소문을 들은 영국 런던택시회사가 10대를 구입했고, 이후 1907년 역사상 처음으로 열린 1만6,000㎞ '북경-파리' 대장정에서 3위를 차지했다. 그 뒤로 4WD는 험로용으로 인정되며 전투용으로 각광받았다.
하지만 네바퀴 굴림이 반드시 산악 및 험로용으로만 활용된 것은 아니었다. 기본적으로 두 바퀴가 구동되는 자동차 특성 상 모든 바퀴의 동력을 조절할 수 있다면 그만큼 안정적인 주행이 가능했고, 자동차회사도 이른바 승용 4WD 시스템 개발에 나서게 됐다.
▲ 네바퀴굴림 승용의 등장
네바퀴 굴림 승용차는 1968년에 처음 등장했다. 앞뒤 37:63 배분이었지만 복잡한 구조와 비싼 값으로 상용화는 실패했다. 이후 독일 아우디와 일본 스바루가 각각의 4WD 기술을 개발하며 시장을 주도했다. 이 가운데 유럽에선 1980년대 아우디가 기계적으로 완벽하게 작동하는 토센 디퍼렌셜(Torsen Differential) 방식의 '콰트로(Quattro)'를 출시하며 4WD 승용의 대중화를 이끌었다.
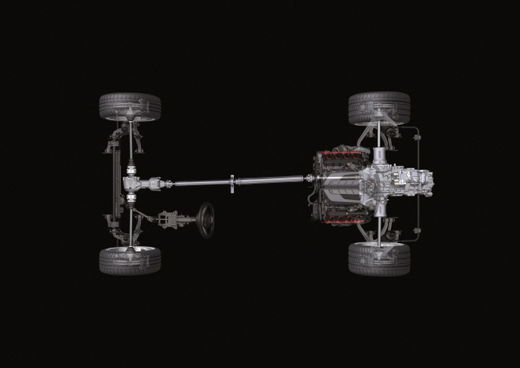
4WD를 이해하려면 디퍼렌셜(Differential)의 개념을 정확히 알아야 한다. 자동차는 기본적으로 바퀴가 회전하면서 움직인다. 그런데 이론적으로 좌우 바퀴가 하나의 차축으로 연결돼 있다고 가정할 때 코너를 돌면 바퀴 사이의 회전차가 생기게 된다. 안쪽 바퀴는 천천히 돌아야 하고, 바깥 쪽은 빨리 굴러야 한다. 차축이 하나로 연결돼 있다면 회전차로 차축이 휘어지거나 부러질 수밖에 없다. 이 문제를 해결한 게 디퍼렌셜이다. 여러 개의 기어를 적용해 회전차를 기계적으로 제어한다.
하지만 디퍼렌셜은 구조상 단점이 존재한다. 엔진에서 나오는 힘을 바퀴에 전달할 때 구동력이 적은 쪽에 힘을 몰아주게 된다. 그래서 바퀴 한쪽이 미끄러지면 해당 바퀴에만 구동력이 계속 전달된다. 이 점을 보완하기 위해 양쪽 차축에 동력을 주고받는 LSD(Limited slip Differential)가 적용됐다.
좌우 바퀴 회전차를 극복하기 위해 디퍼렌셜이 필요한 것처럼 네 개의 바퀴가 모두 굴러가는 네바퀴 굴림은 앞뒤 바퀴의 회전차가 발생한다. 그래서 필요한 것이 바로 센터 디퍼렌셜이다. 하지만 센터 디퍼렌셜도 단점은 있기 마련이다. 예를 들어 뒷바퀴가 모두 미끄러질 경우 구동력이 뒷바퀴에만 몰려 헛돌기 일쑤다. 그래서 운전자가 수동으로 센터 디퍼렌셜을 잠그고(Locked) 열 수 있는 장치가 달리는데, 최근에는 디퍼렌셜의 열고 닫음을 전자적으로 제어하는 수준이다. 결국 업체마다 센터 디퍼렌셜을 어떤 방식으로, 얼마나 빨리 바퀴에 힘을 배분하느냐를 두고 경쟁하는 셈이다.
▲ 아우디 콰트로(Quatrro)
1986년 아우디는 3세대 80 차종에 토센 센터 디퍼렌셜을 처음으로 도입했다. 아우디는 자신들의 네바퀴 굴림 방식에 '콰트로'라는 이름을 붙였다. 콰트로는 이탈리어 말로 숫자 '4'를 의미한다. 그러나 지금은 아우디 4WD 기술로 더 유명해졌다. 콰트로는 한 쪽 바퀴가 미끄러지거나 접지력이 저하됐을 때도 구동이 가능하다는 점에서 세상의 주목을 받기 시작했다. 앞뒤 구동력은 50:50 또는 40:60에 맞추어져 있는데, 기계적 방식으로 연결돼 동력손실이 적고, 힘의 배분이 정확한 게 특징이다. 반응도 빨라서 스포츠세단에도 콰트로가 광범위하게 적용됐다. 하지만 다른 네바퀴 굴림에 비해 연료효율이 낮고, 적극적인 힘 배분이 어려운 단점이 있다. 그럼에도 아우디 명성을 있게 한 승용 4WD 시스템으로 여전히 자존심을 지키고 있다.
국내에서 판매되는 콰트로는 Q7을 비롯해 SUV 대부분과 A6와 A8 등의 세단형 승용차에도 모두 적용되고 있다. 각각의 라인업에 콰트로 제품을 구비해 놓고 있다.
▲ BMW X-Drive
BMW는 4WD 시스템을 X-드라이브로 부른다. 아우디와 메르세데스 벤츠가 각각 콰트로와 4매틱(MATIC)을 내세워 승용 4WD 시장을 주도하자 1987년 뒷바퀴 굴림 특성을 살린 X드라이브의 325Xi를 개발했다. 엔진에서 나오는 동력의 63%를 뒷바퀴로 보내 BMW 특유의 구동성을 확보하려 했다. 하지만 4WD를 사용할 경우 뒷바퀴 굴림의 예민한 주행감각이 저하돼 대중화를 이루지는 못했다. 이후 SAV(Sport Activity Vehicle) 컨셉트를 지닌 X5가 등장하면서 주목받기 시작했다.
X5에 적용된 X드라이브의 핵심기술은 구동력을 네 바퀴에 골고루 보내는 것인데, 0.001초만에 앞 바퀴로 힘을 전달한다. 위험한 상황에서도 차체의 앞뒤 바퀴 구동력을 끊고 연결할 수 있어 탁월한 주행 성능을 발휘한다. 평상에는 앞뒤 40:60으로 구동하다가 뒷바퀴가 미끄러지면 전자적으로 구동력을 제어하는 게 특징이다. 체인이나 기어를 통해 앞으로 최대 50%의 힘을 보내 구동력을 살리기도 한다. 한쪽 바퀴가 미끄러지면 주행안전장치인 DSC와 연동해 극복한다. 미끄러지는 바퀴에 정밀한 제동을 하면서 반대쪽 바퀴로 여분의 힘을 보내는 원리다. 무엇보다 노면 상황에 따라 구동력을 자유롭게 이동할 수 있다는 게 장점이다. 필요할 경우 앞뒤 0:100, 100:0 등의 배분도 가능하다. 현재 국내에서 판매되는 차종으로는 X5와 X3 등 SUV에 주로 적용되고, 세단으로 확대되는 중이다.
▲ 벤츠 4매틱
1985년 메르세데스 벤츠가 W124에 처음으로 채용했다. 마그나 슈타이어사와 공동 개발한 4매틱은 LSD나 잠금 기능 없는 오픈 방식이 특징이다. 더불어 4ETC(Electronic Traction System)과 연계해 전자제어 제동으로 네 바퀴 구동력을 제어하는 기술이다. 2006년 선보인 S클래스 4매틱은 3개의 오픈 디퍼렌셜(앞, 뒤, 센터)을 사용해 얼음 위에서도 구동력이 제어될 수 있을 정도다. 한 바퀴가 접지력을 잃고 미끄러지기 시작하면 트랙션 컨트롤과 연결된 휠 센서가 정보를 읽어 헛도는 바퀴에 인위적으로 제동을 걸어 다른 바퀴로 힘을 보낸다. 아우디가 기계적이라면 메르세데스 벤츠는 전자제어로 자존심을 회복한 셈이다.
국내에서는 SUV ML 시리즈 외에 S클래스, E클래스 등 세단형 승용차에도 널리 적용돼 있다. 무엇보다 주행안정감을 살려주고 있다는 점에서 호평을 받고 있다.
▲ 토요타 AWD
토요타는 차종이 많다보니 네바퀴 굴림의 기술폭도 상당히 넓은 게 특징이다. 기본 뒷바퀴 굴림에 기반을 둔 독일차와 달리 앞바퀴 굴림과 뒷바퀴 굴림 모두에 4WD를 적용해 'AWD'로 부른다. 앞바퀴 굴림 자동차는 뒷바퀴 구동을 가능하게 연결한 비스커스 타입이 주로 활용된다. 비스커스는 기름의 점도 차이를 이용한 것으로, 두 개의 원판사이에 점도가 큰 오일을 넣은 뒤 한쪽이 회전할 때 같이 회전하는 오일에 따라 다른 한쪽도 돌리는 방식이다. 그러다 한쪽 바퀴가 헛돌면 원판간의 회전차가 커지는데 점성이 큰 오일에 저항이 생겨 빨리 회전하려는 원판을 방해하도록 돼 있다 쉽게 말해 오일로 일정한 회전력을 제어하는 방식이다. 매우 효율적이면서 비용절감이 뛰어난 방식으로 잘 알려져 있다.
하지만 뒷바퀴 굴림 차종에 기반을 둔 네바퀴 굴림은 전자제어 다판 클러치를 활용한다. 구동력을 앞뒤 30:70으로 나누고, 미끄러운 주행 안전용 트랙션 컨트롤 기능을 통합제어하기도 한다. 현재 국내에서 판매되는 SUV 등은 대부분 이 방식이다. 무엇보다 포장도로와 비포장도로 등 도로 조건에 정확히 맞는 주행 상황을 끌어낼 수 있어 AWD의 표준으로 불린다.
▲ 4WD의 미래
최근 들어 자동차회사의 4WD는 점차 여러 기능과 함께 연계돼 움직이는 것이 추세다. 단순히 구동력 배분과 조화 뿐 아니라 제동력, 회전력, 차의 기울기 등을 센서로 읽어내 가장 적합한 주행 자세와 구동력을 확보하고 있다. 게다가 과거에는 일상처럼 붙어 있는 2WD와 4WD의 전환 스위치도 없어지지고 있다. 자동차 스스로 노면 정보를 읽어낼 수 있어서다. 그러나 여전히 험로용 4WD는 구동방식 전환 스위치가 마련돼 있다. 험로에선 제 아무리 전자적으로 제어가 잘 되는 4WD라 해도 경우에 따라 운전자의 판단이 적절할 때가 있어서다. 그래서 4WD 시스템도 세단형 승용과 SUV 등 차의 성격에 따라 적용되는 범위와 구동력 조절 방식도 조금씩 달라지는 셈이다.
권용주 기자 soo4195@autotimes.co.kr
▶ 쉐보레, 트랙스 1.7ℓ 디젤 내수 투입 안한다
▶ 신설되는 인제 서킷, 사용료 놓고 신경전 치열
 1900년이 막 지났을 무렵, 사람들은 자동차 매력에 점차 눈을 뜨기 시작했다. 특히 엔진으로 움직이는 기계는 일상을 넘어 다양한 활용여부를 위해 새로운 시도가 이어졌다. 그 가운데 하나가 바로 산악자동차였다. 하지만 두 바퀴 구동의 자동차는 미끄러지거나 한 쪽 바퀴가 회전력을 잃는 순간 애물단지였다. 그래서 1년의 연구 끝에 개발된 시스템이 바로 4WD(Wheel Drive)다<편집자 주>.
1900년이 막 지났을 무렵, 사람들은 자동차 매력에 점차 눈을 뜨기 시작했다. 특히 엔진으로 움직이는 기계는 일상을 넘어 다양한 활용여부를 위해 새로운 시도가 이어졌다. 그 가운데 하나가 바로 산악자동차였다. 하지만 두 바퀴 구동의 자동차는 미끄러지거나 한 쪽 바퀴가 회전력을 잃는 순간 애물단지였다. 그래서 1년의 연구 끝에 개발된 시스템이 바로 4WD(Wheel Drive)다<편집자 주>.1902년 폴란드에서 마차를 만들던 스파이커 형제는 당시 독일과 프랑스를 중심으로 산악 자동차 경주가 유행하자 4WD 자동차를 발명했다. 이듬해 프랑스에서 열린 경주에 출전했고, 2WD 방식을 모두 따돌리고 우승을 차지했다. 1904년에는 4WD 방식의 자동차 5대를 만들어 관광과 여행용으로 판매했다. 당시만 해도 아스팔트 포장 도로가 없었던 시절이어서 험한 길을 달리는 데 적합하다는 소문과 함께 큰 인기를 모았다. 급기야 1906년 소문을 들은 영국 런던택시회사가 10대를 구입했고, 이후 1907년 역사상 처음으로 열린 1만6,000㎞ '북경-파리' 대장정에서 3위를 차지했다. 그 뒤로 4WD는 험로용으로 인정되며 전투용으로 각광받았다.
하지만 네바퀴 굴림이 반드시 산악 및 험로용으로만 활용된 것은 아니었다. 기본적으로 두 바퀴가 구동되는 자동차 특성 상 모든 바퀴의 동력을 조절할 수 있다면 그만큼 안정적인 주행이 가능했고, 자동차회사도 이른바 승용 4WD 시스템 개발에 나서게 됐다.
▲ 네바퀴굴림 승용의 등장
네바퀴 굴림 승용차는 1968년에 처음 등장했다. 앞뒤 37:63 배분이었지만 복잡한 구조와 비싼 값으로 상용화는 실패했다. 이후 독일 아우디와 일본 스바루가 각각의 4WD 기술을 개발하며 시장을 주도했다. 이 가운데 유럽에선 1980년대 아우디가 기계적으로 완벽하게 작동하는 토센 디퍼렌셜(Torsen Differential) 방식의 '콰트로(Quattro)'를 출시하며 4WD 승용의 대중화를 이끌었다.
4WD를 이해하려면 디퍼렌셜(Differential)의 개념을 정확히 알아야 한다. 자동차는 기본적으로 바퀴가 회전하면서 움직인다. 그런데 이론적으로 좌우 바퀴가 하나의 차축으로 연결돼 있다고 가정할 때 코너를 돌면 바퀴 사이의 회전차가 생기게 된다. 안쪽 바퀴는 천천히 돌아야 하고, 바깥 쪽은 빨리 굴러야 한다. 차축이 하나로 연결돼 있다면 회전차로 차축이 휘어지거나 부러질 수밖에 없다. 이 문제를 해결한 게 디퍼렌셜이다. 여러 개의 기어를 적용해 회전차를 기계적으로 제어한다.
하지만 디퍼렌셜은 구조상 단점이 존재한다. 엔진에서 나오는 힘을 바퀴에 전달할 때 구동력이 적은 쪽에 힘을 몰아주게 된다. 그래서 바퀴 한쪽이 미끄러지면 해당 바퀴에만 구동력이 계속 전달된다. 이 점을 보완하기 위해 양쪽 차축에 동력을 주고받는 LSD(Limited slip Differential)가 적용됐다.
좌우 바퀴 회전차를 극복하기 위해 디퍼렌셜이 필요한 것처럼 네 개의 바퀴가 모두 굴러가는 네바퀴 굴림은 앞뒤 바퀴의 회전차가 발생한다. 그래서 필요한 것이 바로 센터 디퍼렌셜이다. 하지만 센터 디퍼렌셜도 단점은 있기 마련이다. 예를 들어 뒷바퀴가 모두 미끄러질 경우 구동력이 뒷바퀴에만 몰려 헛돌기 일쑤다. 그래서 운전자가 수동으로 센터 디퍼렌셜을 잠그고(Locked) 열 수 있는 장치가 달리는데, 최근에는 디퍼렌셜의 열고 닫음을 전자적으로 제어하는 수준이다. 결국 업체마다 센터 디퍼렌셜을 어떤 방식으로, 얼마나 빨리 바퀴에 힘을 배분하느냐를 두고 경쟁하는 셈이다.
▲ 아우디 콰트로(Quatrro)
1986년 아우디는 3세대 80 차종에 토센 센터 디퍼렌셜을 처음으로 도입했다. 아우디는 자신들의 네바퀴 굴림 방식에 '콰트로'라는 이름을 붙였다. 콰트로는 이탈리어 말로 숫자 '4'를 의미한다. 그러나 지금은 아우디 4WD 기술로 더 유명해졌다. 콰트로는 한 쪽 바퀴가 미끄러지거나 접지력이 저하됐을 때도 구동이 가능하다는 점에서 세상의 주목을 받기 시작했다. 앞뒤 구동력은 50:50 또는 40:60에 맞추어져 있는데, 기계적 방식으로 연결돼 동력손실이 적고, 힘의 배분이 정확한 게 특징이다. 반응도 빨라서 스포츠세단에도 콰트로가 광범위하게 적용됐다. 하지만 다른 네바퀴 굴림에 비해 연료효율이 낮고, 적극적인 힘 배분이 어려운 단점이 있다. 그럼에도 아우디 명성을 있게 한 승용 4WD 시스템으로 여전히 자존심을 지키고 있다.
국내에서 판매되는 콰트로는 Q7을 비롯해 SUV 대부분과 A6와 A8 등의 세단형 승용차에도 모두 적용되고 있다. 각각의 라인업에 콰트로 제품을 구비해 놓고 있다.
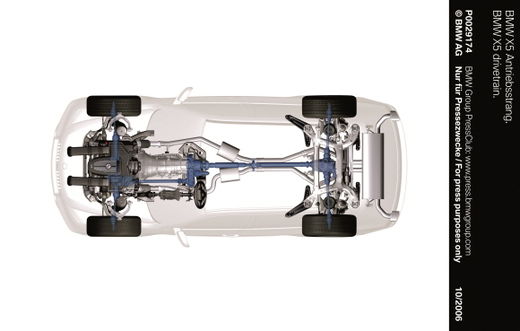
▲ BMW X-Drive
BMW는 4WD 시스템을 X-드라이브로 부른다. 아우디와 메르세데스 벤츠가 각각 콰트로와 4매틱(MATIC)을 내세워 승용 4WD 시장을 주도하자 1987년 뒷바퀴 굴림 특성을 살린 X드라이브의 325Xi를 개발했다. 엔진에서 나오는 동력의 63%를 뒷바퀴로 보내 BMW 특유의 구동성을 확보하려 했다. 하지만 4WD를 사용할 경우 뒷바퀴 굴림의 예민한 주행감각이 저하돼 대중화를 이루지는 못했다. 이후 SAV(Sport Activity Vehicle) 컨셉트를 지닌 X5가 등장하면서 주목받기 시작했다.
X5에 적용된 X드라이브의 핵심기술은 구동력을 네 바퀴에 골고루 보내는 것인데, 0.001초만에 앞 바퀴로 힘을 전달한다. 위험한 상황에서도 차체의 앞뒤 바퀴 구동력을 끊고 연결할 수 있어 탁월한 주행 성능을 발휘한다. 평상에는 앞뒤 40:60으로 구동하다가 뒷바퀴가 미끄러지면 전자적으로 구동력을 제어하는 게 특징이다. 체인이나 기어를 통해 앞으로 최대 50%의 힘을 보내 구동력을 살리기도 한다. 한쪽 바퀴가 미끄러지면 주행안전장치인 DSC와 연동해 극복한다. 미끄러지는 바퀴에 정밀한 제동을 하면서 반대쪽 바퀴로 여분의 힘을 보내는 원리다. 무엇보다 노면 상황에 따라 구동력을 자유롭게 이동할 수 있다는 게 장점이다. 필요할 경우 앞뒤 0:100, 100:0 등의 배분도 가능하다. 현재 국내에서 판매되는 차종으로는 X5와 X3 등 SUV에 주로 적용되고, 세단으로 확대되는 중이다.

▲ 벤츠 4매틱
1985년 메르세데스 벤츠가 W124에 처음으로 채용했다. 마그나 슈타이어사와 공동 개발한 4매틱은 LSD나 잠금 기능 없는 오픈 방식이 특징이다. 더불어 4ETC(Electronic Traction System)과 연계해 전자제어 제동으로 네 바퀴 구동력을 제어하는 기술이다. 2006년 선보인 S클래스 4매틱은 3개의 오픈 디퍼렌셜(앞, 뒤, 센터)을 사용해 얼음 위에서도 구동력이 제어될 수 있을 정도다. 한 바퀴가 접지력을 잃고 미끄러지기 시작하면 트랙션 컨트롤과 연결된 휠 센서가 정보를 읽어 헛도는 바퀴에 인위적으로 제동을 걸어 다른 바퀴로 힘을 보낸다. 아우디가 기계적이라면 메르세데스 벤츠는 전자제어로 자존심을 회복한 셈이다.
국내에서는 SUV ML 시리즈 외에 S클래스, E클래스 등 세단형 승용차에도 널리 적용돼 있다. 무엇보다 주행안정감을 살려주고 있다는 점에서 호평을 받고 있다.
▲ 토요타 AWD
토요타는 차종이 많다보니 네바퀴 굴림의 기술폭도 상당히 넓은 게 특징이다. 기본 뒷바퀴 굴림에 기반을 둔 독일차와 달리 앞바퀴 굴림과 뒷바퀴 굴림 모두에 4WD를 적용해 'AWD'로 부른다. 앞바퀴 굴림 자동차는 뒷바퀴 구동을 가능하게 연결한 비스커스 타입이 주로 활용된다. 비스커스는 기름의 점도 차이를 이용한 것으로, 두 개의 원판사이에 점도가 큰 오일을 넣은 뒤 한쪽이 회전할 때 같이 회전하는 오일에 따라 다른 한쪽도 돌리는 방식이다. 그러다 한쪽 바퀴가 헛돌면 원판간의 회전차가 커지는데 점성이 큰 오일에 저항이 생겨 빨리 회전하려는 원판을 방해하도록 돼 있다 쉽게 말해 오일로 일정한 회전력을 제어하는 방식이다. 매우 효율적이면서 비용절감이 뛰어난 방식으로 잘 알려져 있다.
하지만 뒷바퀴 굴림 차종에 기반을 둔 네바퀴 굴림은 전자제어 다판 클러치를 활용한다. 구동력을 앞뒤 30:70으로 나누고, 미끄러운 주행 안전용 트랙션 컨트롤 기능을 통합제어하기도 한다. 현재 국내에서 판매되는 SUV 등은 대부분 이 방식이다. 무엇보다 포장도로와 비포장도로 등 도로 조건에 정확히 맞는 주행 상황을 끌어낼 수 있어 AWD의 표준으로 불린다.
▲ 4WD의 미래
최근 들어 자동차회사의 4WD는 점차 여러 기능과 함께 연계돼 움직이는 것이 추세다. 단순히 구동력 배분과 조화 뿐 아니라 제동력, 회전력, 차의 기울기 등을 센서로 읽어내 가장 적합한 주행 자세와 구동력을 확보하고 있다. 게다가 과거에는 일상처럼 붙어 있는 2WD와 4WD의 전환 스위치도 없어지지고 있다. 자동차 스스로 노면 정보를 읽어낼 수 있어서다. 그러나 여전히 험로용 4WD는 구동방식 전환 스위치가 마련돼 있다. 험로에선 제 아무리 전자적으로 제어가 잘 되는 4WD라 해도 경우에 따라 운전자의 판단이 적절할 때가 있어서다. 그래서 4WD 시스템도 세단형 승용과 SUV 등 차의 성격에 따라 적용되는 범위와 구동력 조절 방식도 조금씩 달라지는 셈이다.
권용주 기자 soo4195@autotimes.co.kr
▶ 쉐보레, 트랙스 1.7ℓ 디젤 내수 투입 안한다
▶ 신설되는 인제 서킷, 사용료 놓고 신경전 치열
관련뉴스












