 현대자동차그룹은 우주 분야 최고 역량을 보유한 국내 연구기관들과 함께 달 탐사 전용 '로버(Rover)'의 개발 모델 제작에 본격 착수했다고 20일 밝혔다.
현대자동차그룹은 우주 분야 최고 역량을 보유한 국내 연구기관들과 함께 달 탐사 전용 '로버(Rover)'의 개발 모델 제작에 본격 착수했다고 20일 밝혔다.현대차그룹의 이번 달 탐사용 로버 개발 추진은 우주 분야 기술력 확보를 통한 대한민국 과학 연구 발전에 기여하기 위한 차원이다.
현대차그룹은 지난해 7월 달 탐사용 로버 개발을 위해 한국천문연구원(KASI), 한국전자통신연구원(ETRI), 한국건설기술연구원(KICT), 한국항공우주연구원(KARI), 한국원자력연구원(KAERI), 한국자동차연구원(KATECH) 등 국내 우주 분야 6개 연구기관과 다자간 공동연구 협약(MOU)을 체결했다.
이후 현대차그룹은 연구기관들과 충분한 논의를 거쳐 달 탐사 로버의 초기 모델 제작 방향을 구체화했다. 목표는 달의 남극부에 착륙해 광물 채취, 환경 분석 등 각종 과학 임무를 수행하는 것으로 정했다.
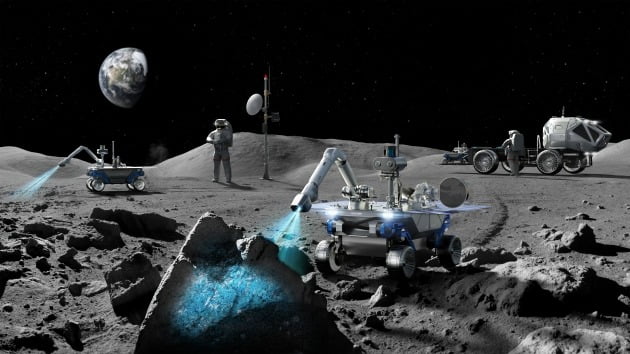
현대차그룹은 이날 로버 개발모델 콘셉트의 이미지를 공개했다.
달 표면 탐사 전용 소형 자율주행 모빌리티로 태양광을 통한 자체 충전 시스템과 현대차그룹의 최첨단 자율주행 기술이 적용된다.
낮밤 기온 차이가 300도 이상에 달하는 달 표면의 극한 환경을 견디기 위한 열관리 및 방사능 차폐 장치, 금속 구동 휠과 같은 높은 수준의 기술을 국내 정상급 연구기관들과 공동 개발한다.
개발모델은 최대 중량 70㎏을 목표로 크게 상·하부로 구분된다.
상부는 달 표면 탐사 기능을 주로 수행하게 되며, 하부는 구동계로서 현대차그룹의 혁신 기술이 대거 활용될 예정이다. 하부는 달 표면을 자유롭게 돌아다닐 수 있는 플랫폼 형태로 개발돼 향후 상부 기능이 추가 또는 변경되더라도 동일한 하부 플랫폼을 활용할 수 있도록 제작된다.
현대차그룹은 이르면 내년 하반기에 달 탐사 로버 개발모델 제작이 마무리될 수 있을 것으로 기대하고 있다. 이후 실제 달 표면과 유사한 환경에서 주행 및 임무 수행 연구를 계속 추진하면서 기능을 지속 업그레이드해 2027년엔 실제 달 표면 탐사가 가능한 제품을 선보일 계획이다.
현대차그룹 관계자는 "그동안 현대차그룹은 인류 이동 경험의 영역을 확장해 인류의 진보에 기여하겠다는 목표를 꾸준히 밝혀왔다"며 "지난해 CES에서 공개한 '메타모빌리티'와 같은 미래 비전을 현실화하기 위해 과감한 도전을 지속해나가겠다“고 말했다.
최수진 한경닷컴 기자 naive@hankyung.com
관련뉴스