가루 로봇이 방사성 폐수 헤엄치며 세슘만 골라 제거
한국원자력연구원 개발…"기존보다 정화속도 60배 빨라"

(대전=연합뉴스) 이재림 기자 = 국내 연구진이 폐수를 헤엄치며 방사성 물질만 제거하는 로봇을 개발했다.
한국원자력연구원은 19일 박찬우 해체기술연구부 박사팀이 원격 제어로 방사성 폐수 속 세슘을 감지하고 잡아내는 화학적 미세 수중로봇을 만들었다고 밝혔다.
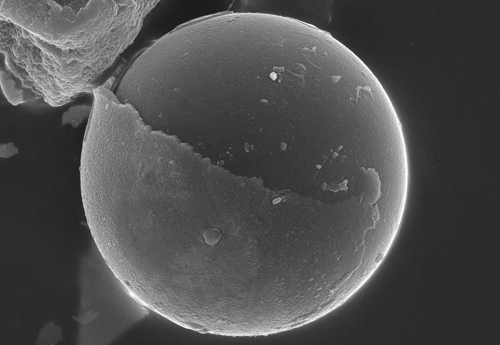
이 로봇은 머리카락 두께 10분의 1가량인 7㎛(마이크로미터) 크기다. 맨눈으로는 거의 안 보이는데, 자세히 들여다봐도 그냥 가루 같다.
기본 몸체는 세슘 흡착용 페로시안화 구리를 입힌 이산화규소 마이크로 입자다. 한쪽 면에는 백금 촉매와 니켈을 코팅해 운동 능력을 부여했다.
방사성 폐수에 이 미세 로봇과 과산화수소를 함께 넣으면, 백금 촉매와 과산화수소가 화학적으로 반응하며 산소 방울이 생긴다. 미세 로봇은 이를 추진력 삼아 움직인다.
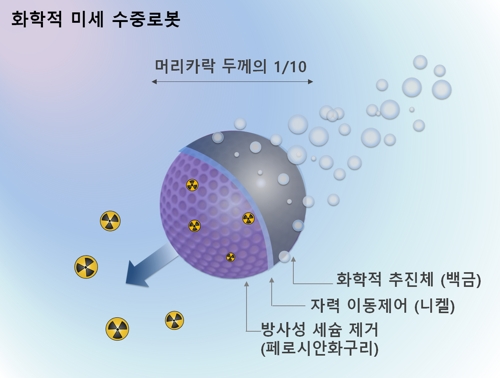
자성을 가진 니켈 특성을 이용해 외부에서 자기장으로 로봇 이동을 제어할 수도 있다.
방사성 세슘을 없애라는 임무 앞에선 무척 민첩하다.
움직이지 않는 기존 수동형 흡착제와 비교해 60배가량 제거 속도가 빠르다고 연구팀은 설명했다.
세슘만 선택적으로 골라내는 능력도 탁월하다.
박찬우 박사는 "나트륨처럼 세슘과 비슷한 특성을 가진 경쟁 이온이 있더라도 세슘을 98% 이상 없앴다"며 "종합적으로 폐수 정화에 들어가는 시간을 단축할 수 있다는 의미"라고 말했다.
방사성 폐수 특성상 작업자 피폭을 예방하는 준비 작업이 무척 까다로운데, 이 로봇은 원격 제어를 할 수 있어서 방사선 노출을 최소화할 수 있다.
세슘 포획 후 미세 로봇만 거둬들여 방사성폐기물로 분리·처분하면 되기 때문에 효율적이다.
박찬우 박사는 "방사성 폐수 처리에 획기적인 발전을 가져올 수 있을 것"이라며 "친환경적 추진체 도입과 원격 제어 기술 보완 등을 거쳐 2023년께 상용화할 수 있도록 노력할 것"이라고 말했다.
관련 특허 등록을 마무리한 연구원 측은 수계 환경이나 산업 폐수 정화 등에도 이번 기술을 응용할 수 있도록 할 방침이다.
박원석 한국원자력연구원장은 "원자력 안전을 위한 다양한 기술을 구현해 국가 현안 해결 지원에 앞장설 것"이라고 덧붙였다.
연구는 과학기술정보통신부 미래원자력연구센터 사업으로 수행했다.
성과를 담은 논문은 '유해물질 저널'(Journal of Hazardous Materials) 5월호에 실렸다.
walden@yna.co.kr
(끝)
<저작권자(c) 연합뉴스, 무단 전재-재배포 금지>
한국원자력연구원 개발…"기존보다 정화속도 60배 빨라"
(대전=연합뉴스) 이재림 기자 = 국내 연구진이 폐수를 헤엄치며 방사성 물질만 제거하는 로봇을 개발했다.
한국원자력연구원은 19일 박찬우 해체기술연구부 박사팀이 원격 제어로 방사성 폐수 속 세슘을 감지하고 잡아내는 화학적 미세 수중로봇을 만들었다고 밝혔다.
이 로봇은 머리카락 두께 10분의 1가량인 7㎛(마이크로미터) 크기다. 맨눈으로는 거의 안 보이는데, 자세히 들여다봐도 그냥 가루 같다.
기본 몸체는 세슘 흡착용 페로시안화 구리를 입힌 이산화규소 마이크로 입자다. 한쪽 면에는 백금 촉매와 니켈을 코팅해 운동 능력을 부여했다.
방사성 폐수에 이 미세 로봇과 과산화수소를 함께 넣으면, 백금 촉매와 과산화수소가 화학적으로 반응하며 산소 방울이 생긴다. 미세 로봇은 이를 추진력 삼아 움직인다.
자성을 가진 니켈 특성을 이용해 외부에서 자기장으로 로봇 이동을 제어할 수도 있다.
방사성 세슘을 없애라는 임무 앞에선 무척 민첩하다.
움직이지 않는 기존 수동형 흡착제와 비교해 60배가량 제거 속도가 빠르다고 연구팀은 설명했다.
세슘만 선택적으로 골라내는 능력도 탁월하다.
박찬우 박사는 "나트륨처럼 세슘과 비슷한 특성을 가진 경쟁 이온이 있더라도 세슘을 98% 이상 없앴다"며 "종합적으로 폐수 정화에 들어가는 시간을 단축할 수 있다는 의미"라고 말했다.
방사성 폐수 특성상 작업자 피폭을 예방하는 준비 작업이 무척 까다로운데, 이 로봇은 원격 제어를 할 수 있어서 방사선 노출을 최소화할 수 있다.
세슘 포획 후 미세 로봇만 거둬들여 방사성폐기물로 분리·처분하면 되기 때문에 효율적이다.
박찬우 박사는 "방사성 폐수 처리에 획기적인 발전을 가져올 수 있을 것"이라며 "친환경적 추진체 도입과 원격 제어 기술 보완 등을 거쳐 2023년께 상용화할 수 있도록 노력할 것"이라고 말했다.
관련 특허 등록을 마무리한 연구원 측은 수계 환경이나 산업 폐수 정화 등에도 이번 기술을 응용할 수 있도록 할 방침이다.
박원석 한국원자력연구원장은 "원자력 안전을 위한 다양한 기술을 구현해 국가 현안 해결 지원에 앞장설 것"이라고 덧붙였다.
연구는 과학기술정보통신부 미래원자력연구센터 사업으로 수행했다.
성과를 담은 논문은 '유해물질 저널'(Journal of Hazardous Materials) 5월호에 실렸다.
walden@yna.co.kr
(끝)
<저작권자(c) 연합뉴스, 무단 전재-재배포 금지>
관련뉴스