꼬리가 다섯 번째 발 역할 수직 표면 착륙 가능한 도마뱀붙이
나무사이 활공 때 꼬리 역할 규명…비행로봇 수직표면 착륙 응용

(서울=연합뉴스) 엄남석 기자 = 도마뱀붙이(gecko)는 발바닥에 흡반(吸盤)이 달려있어 수직 기둥을 힘들이지 않고 기어오르고 천장에 거꾸로 매달려있기도 한다.
심지어 물 위로 뛸 수도 있는데, 이런 능력에 더해 나무 사이로 활공하면서 꼬리를 지지대로 나무의 수직 몸통에 안착할 수 있는 것으로 나타났다.
독일 막스 플랑크 지능 시스템 연구소의 아르디안 유수피 박사가 이끄는 연구팀은 아시아에 서식하는 '납작꼬리 도마뱀붙이'(Hemidactylus platyurus)의 활공 능력과 꼬리의 역할을 분석한 연구 결과를 과학 저널 '네이처 커뮤니케이션스 바이올로지'(Nature Communications Biology)에 발표했다.
납작꼬리 도마뱀붙이는 나무에 살면서 포식자를 피해 나무 사이를 수 미터씩 활공한다. 눈 깜짝할 사이지만 온몸으로 나무 몸통에 부딪히고 큰 충격을 받지만 추락하지 않고 수직 표면에 착륙을 한다.
막스 플랑크 연구소와 네이처 등에 따르면 연구팀은 우선 싱가포르 우림 내 야생동물 보호구역에서 납작꼬리 도마뱀붙이의 활공 능력을 분석할 수 있는 실험 장치를 설치했다.
약 7m 높이의 플랫폼에서 도마뱀이 옆 나무로 뛰어내려 활공하게 하고 근접 초고속 카메라로 착륙 과정을 촬영했다.
그 결과, 납작꼬리 도마뱀의 활공 속도는 초속 6m. 시속으로 따지면 21㎞에 달한다. 이런 속도로 나무 몸통에 부딪히면 철로 된 차량도 찌그러지지만 납작꼬리 도마뱀붙이는 나무에서 떨어지지 않고 안착한 뒤 아무 일도 없었다는 듯 다음 행동을 이어갔다.

하지만 꼬리가 잘린 도마뱀은 예외였다. 나무 몸통과 충돌한 뒤 수직 표면에 붙어있지 못하고 나무 밑둥으로 추락했다.
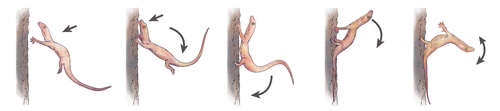
연구팀은 모두 30마리의 야생 도마뱀을 대상으로 한 실험에서 16마리의 착륙 과정을 포착했다. 초고속으로 촬영된 영상에서 이들 모두 머리부터 나무 몸통에 충돌하고 그 충격으로 몸이 100도까지 뒤로 휘는 것으로 나타났다.
꼬리를 가진 14마리 중 8마리는 머리와 몸통이 뒤로 튕겨질 때 앞발로 나무를 붙잡는 힘을 잃었지만 꼬리로 지탱하며 이내 안정을 되찾아 추락하지 않았다. 다른 네 마리는 꼬리의 도움 없이 네 발 모두 붙잡는 힘을 유지했으며, 나머지 한 마리는 꼬리의 도움에도 나무에 붙어있지 못하고 떨어졌다.
꼬리가 잘린 두 마리는 착륙을 시도했지만 모두 추락하고 말았다.
연구팀은 착륙 과정에서 나무 몸통과 충돌하는 충격으로 퉁겨진 도마뱀 몸의 에너지가 꼬리를 나무 쪽으로 세게 밀어붙이면서 소멸한 것으로 추정했다. 꼬리가 제5의 발이 돼 충돌 충격을 흡수하고 앞발의 붙잡는 힘을 회복하는 역할을 한 셈이다.
연구팀은 꼬리의 역할을 정확히 확인하기 위해 납작꼬리 도마뱀붙이를 모델로 꼬리 유무에 차이를 둔 두 종의 소프트 로봇을 제작해 실험을 진행했다.
납작꼬리 도마뱀과 비슷한 활공 속도를 내기 위해 새총으로 로봇을 찍찍이(벨크로)가 부착된 수직 평면을 향해 발사했다.
<YNAPHOTO path='AKR20210903078000009_06_i.jpg' id='AKR20210903078000009_0601' title='납작꼬리 도마뱀을 모델로 한 로봇' caption='[Ardian Jusufi lab 제공/ 재판매 및 DB 금지]'/>
그 결과, 꼬리가 없는 도마뱀 로봇의 수직 평면착륙 성공률은 15%에 그친 것과 달리 꼬리가 달린 로봇의 성공률은 55%에 달했다.
또 도마뱀 로봇의 꼬리를 원래 길이에서 25% 줄이자 수직표면에 안착하는데 필요한 발바닥의 힘이 두 배 이상으로 늘어나는 것으로 나타났다.
이런 결과들은 납작꼬리 도마뱀의 꼬리가 수직 표면에 붙어있는 데 필요한 발바닥 힘의 양을 줄여줌으로써 수직표면 착륙의 안정성과 성공률을 높여준다는 점을 보여주는 것이라고 연구팀은 밝혔다.
연구팀은 이번 연구 결과를 통해 납작꼬리 도마뱀의 꼬리와 같은 구조가 드론을 비롯한 비행 로봇이 수직 표면에 착륙할 때 이용될 수 있다고 했다.
eomns@yna.co.kr
(끝)
<저작권자(c) 연합뉴스, 무단 전재-재배포 금지>
나무사이 활공 때 꼬리 역할 규명…비행로봇 수직표면 착륙 응용
(서울=연합뉴스) 엄남석 기자 = 도마뱀붙이(gecko)는 발바닥에 흡반(吸盤)이 달려있어 수직 기둥을 힘들이지 않고 기어오르고 천장에 거꾸로 매달려있기도 한다.
심지어 물 위로 뛸 수도 있는데, 이런 능력에 더해 나무 사이로 활공하면서 꼬리를 지지대로 나무의 수직 몸통에 안착할 수 있는 것으로 나타났다.
독일 막스 플랑크 지능 시스템 연구소의 아르디안 유수피 박사가 이끄는 연구팀은 아시아에 서식하는 '납작꼬리 도마뱀붙이'(Hemidactylus platyurus)의 활공 능력과 꼬리의 역할을 분석한 연구 결과를 과학 저널 '네이처 커뮤니케이션스 바이올로지'(Nature Communications Biology)에 발표했다.
납작꼬리 도마뱀붙이는 나무에 살면서 포식자를 피해 나무 사이를 수 미터씩 활공한다. 눈 깜짝할 사이지만 온몸으로 나무 몸통에 부딪히고 큰 충격을 받지만 추락하지 않고 수직 표면에 착륙을 한다.
막스 플랑크 연구소와 네이처 등에 따르면 연구팀은 우선 싱가포르 우림 내 야생동물 보호구역에서 납작꼬리 도마뱀붙이의 활공 능력을 분석할 수 있는 실험 장치를 설치했다.
약 7m 높이의 플랫폼에서 도마뱀이 옆 나무로 뛰어내려 활공하게 하고 근접 초고속 카메라로 착륙 과정을 촬영했다.
그 결과, 납작꼬리 도마뱀의 활공 속도는 초속 6m. 시속으로 따지면 21㎞에 달한다. 이런 속도로 나무 몸통에 부딪히면 철로 된 차량도 찌그러지지만 납작꼬리 도마뱀붙이는 나무에서 떨어지지 않고 안착한 뒤 아무 일도 없었다는 듯 다음 행동을 이어갔다.
하지만 꼬리가 잘린 도마뱀은 예외였다. 나무 몸통과 충돌한 뒤 수직 표면에 붙어있지 못하고 나무 밑둥으로 추락했다.
연구팀은 모두 30마리의 야생 도마뱀을 대상으로 한 실험에서 16마리의 착륙 과정을 포착했다. 초고속으로 촬영된 영상에서 이들 모두 머리부터 나무 몸통에 충돌하고 그 충격으로 몸이 100도까지 뒤로 휘는 것으로 나타났다.
꼬리를 가진 14마리 중 8마리는 머리와 몸통이 뒤로 튕겨질 때 앞발로 나무를 붙잡는 힘을 잃었지만 꼬리로 지탱하며 이내 안정을 되찾아 추락하지 않았다. 다른 네 마리는 꼬리의 도움 없이 네 발 모두 붙잡는 힘을 유지했으며, 나머지 한 마리는 꼬리의 도움에도 나무에 붙어있지 못하고 떨어졌다.
꼬리가 잘린 두 마리는 착륙을 시도했지만 모두 추락하고 말았다.
연구팀은 착륙 과정에서 나무 몸통과 충돌하는 충격으로 퉁겨진 도마뱀 몸의 에너지가 꼬리를 나무 쪽으로 세게 밀어붙이면서 소멸한 것으로 추정했다. 꼬리가 제5의 발이 돼 충돌 충격을 흡수하고 앞발의 붙잡는 힘을 회복하는 역할을 한 셈이다.
연구팀은 꼬리의 역할을 정확히 확인하기 위해 납작꼬리 도마뱀붙이를 모델로 꼬리 유무에 차이를 둔 두 종의 소프트 로봇을 제작해 실험을 진행했다.
납작꼬리 도마뱀과 비슷한 활공 속도를 내기 위해 새총으로 로봇을 찍찍이(벨크로)가 부착된 수직 평면을 향해 발사했다.
<YNAPHOTO path='AKR20210903078000009_06_i.jpg' id='AKR20210903078000009_0601' title='납작꼬리 도마뱀을 모델로 한 로봇' caption='[Ardian Jusufi lab 제공/ 재판매 및 DB 금지]'/>
그 결과, 꼬리가 없는 도마뱀 로봇의 수직 평면착륙 성공률은 15%에 그친 것과 달리 꼬리가 달린 로봇의 성공률은 55%에 달했다.
또 도마뱀 로봇의 꼬리를 원래 길이에서 25% 줄이자 수직표면에 안착하는데 필요한 발바닥의 힘이 두 배 이상으로 늘어나는 것으로 나타났다.
이런 결과들은 납작꼬리 도마뱀의 꼬리가 수직 표면에 붙어있는 데 필요한 발바닥 힘의 양을 줄여줌으로써 수직표면 착륙의 안정성과 성공률을 높여준다는 점을 보여주는 것이라고 연구팀은 밝혔다.
연구팀은 이번 연구 결과를 통해 납작꼬리 도마뱀의 꼬리와 같은 구조가 드론을 비롯한 비행 로봇이 수직 표면에 착륙할 때 이용될 수 있다고 했다.
eomns@yna.co.kr
(끝)
<저작권자(c) 연합뉴스, 무단 전재-재배포 금지>
관련뉴스